

Big Arch Bot
12 April 2025
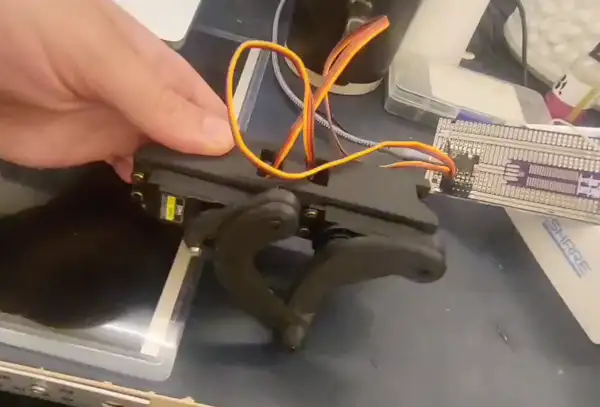
Robot walker carrying a burger
I've built a bunch of walking robots over the years but they always have a fatal flaw - usually being too heavy for the cheap servos I buy to lift. Then I came across this interesting method of locomotion. It uses a conservative two servos for each limb, but rather than a hip and knee they have two parallel hinged joints. I believe it's called a planar configuration and is rather unusual but after a classic Lego POC I designed and built this rig. It's not great at turning and has a somewhat haphazard gait but for a robot platform with simple 2 DOF legs it's pretty cool and can support its own weight - what with the one of it's bi-femurs usually in the downward position.